1 March ’22
WHAT
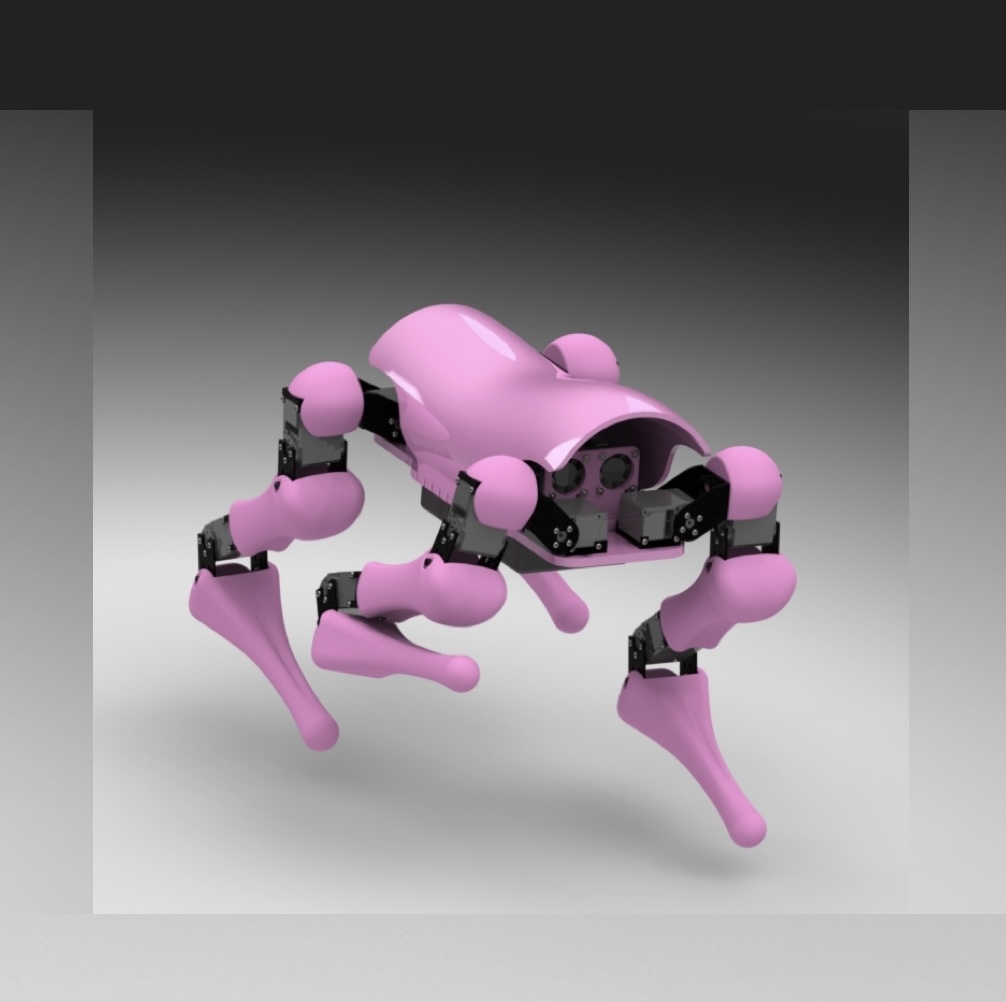
The Pink Panther is a robust & low-cost quadruped robot with the ability to reliably walk on flat surfaces at 1/3 m/s. It was a platform for the development of a novel
method of generating accurate robot simulations - typically very hard to tune properly (known as the simulation-reality gap)
WHY
I initially built the Pink Panther to experience first hand the intricacies of building a robot and having it walk.
It turned into a project in Hod Lipson’s Creative Machines Lab
in which we proposed a method for tuning robot simulations involving a small amount of real robot data and a much more computationally efficient method
HOW
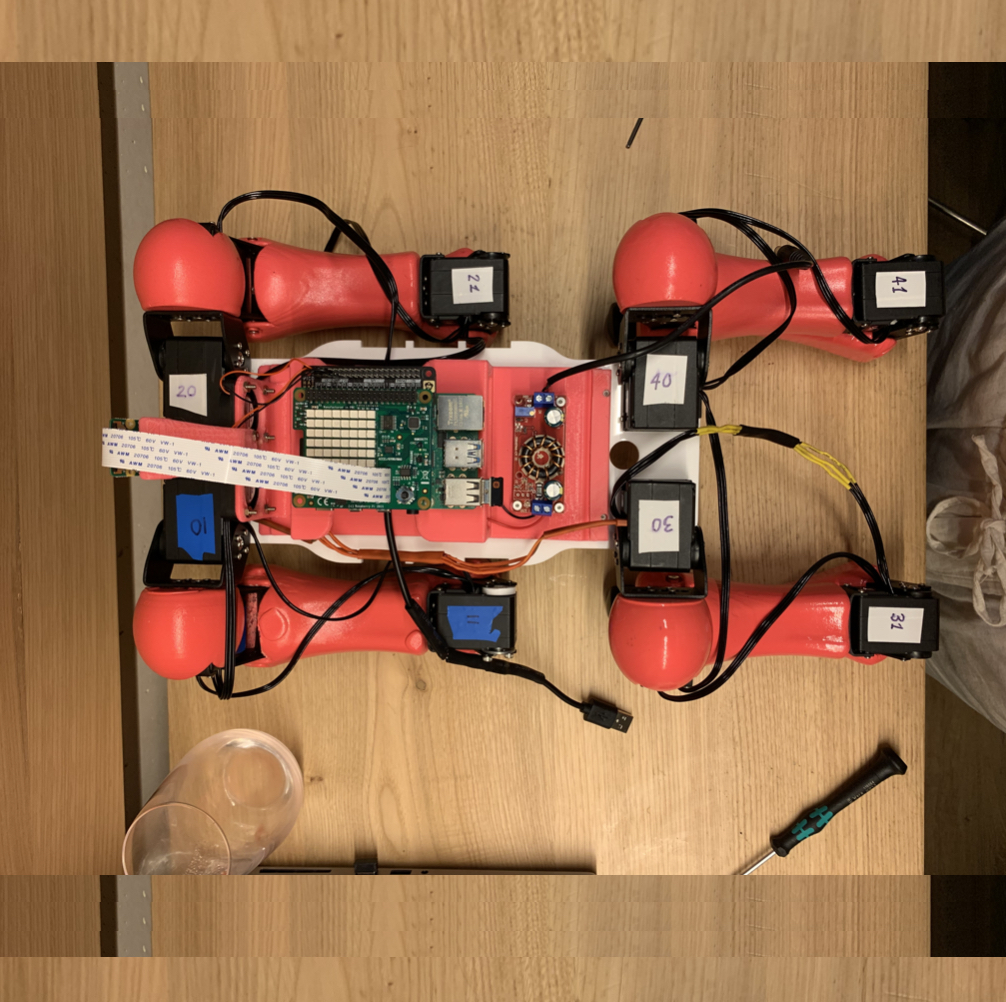
I went from sketches and back of the envelope calculations to Solid Works CAD iterations; from a simulated robot to a fully built
one walking in the real world. The robot is controlled by a Raspberry-Pi using python and moves with its 12 motors. The Deep Learning algorithm for tuning simulations
was developed by my partner Rob Kwiatkowski
Find the paper, the CAD & the documentation here
 .
.



© 2023